
Lecture 33: Iterative Local Search#
Overview#
As the name suggests, the Iterative Local Search algorithm repeatedly deploys local search heuristics until convergence. In each such iteration, the algorithm transforms the current solution – s, to generate a new solution – s’, in its neighbourhood – N. The algorithm then performs a local search on this new solution using one of the local search heuristics – \(\text{LS}\), such as the Hill Climb, Tabu Search, Threshold Accepting, Simulated Annealing, etc, given search parameters – χ. The Iterative Local Search algorithm then updates the current and best solution based on quality of the resulting new solution, determined by the objective function value – f. Finally, upon convergence, determined by a threshold level of solution quality or computation effort, the algorithm returns the best solution.
The Iterative Local Search algorithm effectively balances exploration and exploitation. In particular, it ensures solution landscape exploration (diversification) through the neighbourhood transformations that render new random solutions to escape local optima traps. On the other hand, the algorithm ensures solution landscape exploitation (intensification) through the local search heuristics that refine solutions to reach local optima. Hence, the algorithm necessitates deliberate development contextual to the problem at hand with suitable neighbourhood structure, appropriate local search procedure, and sophisticated parameter tuning. Thus, the literature has sparsely deployed Iterative Local Search algorithm for optimisation in the context of ITS; some examples include vehicle navigation, vehicle routing, and traffic signal optimisation.
Pseudo Code#
Procedure \(\text{ILS}(s_o, (\text{LS}, N, \chi))\)
\(s ← s_o\) // initialise current solution \(s\) as the initial solution \(s_o\)
\(s^* ← s\) // initialise best solution \(s^*\) as the current solution
while \(!\text{converged}\) do // repeat until converged
\(s' {R \atop ←} N(s)\) // generate new random solution from neighborhood \(N\) of the current solution
\(s' ← \text{LS}(s', (N, \chi))\) // perform local search \(\text{LS}\) on the new solution given search parameters \(\chi\)
if \(f(s') < f(s)\) then // if the new solution is better than the current solution
\(s ← s'\) // update the current solution to the new solution
end if
if \(f(s) < f(s^*)\) then // if the current solution is better than the best solution
\(s^* ← s\) // update the best solution to the current solution
end if
end while
return \(s^*\) // return the best solution
Implementation#
import copy
import random
import numpy as np
import matplotlib.cm as cm
import matplotlib.pyplot as plt
def ils(s_o, ls, N, X, n=100, t=1e-5):
"""
Iterative Local Search (ILS) Algorithm
Parameters:
- s_o: Initial solution
- ls: Local search function
- N: Neighborhood function
- X: Parameters for local search
- n: Maximum number of iterations
- t: Convergence threshold
Returns:
- Best solution found in each iteration
"""
s = s_o # Current solution
s_b = s # Best solution found
S = [s_b] # Track best solutions over iterations
i = 1
e = float('inf')
converged = False
while not converged:
s_n = N(s) # Perturbation: generate neighbor
s_n = ls(s_n, N, X) # Apply local search
if f(s_n) < f(s): # Accept if better than current
s = s_n
if f(s) < f(s_b): # Update best solution if improved
e = f(s_b) - f(s)
s_b = s
S.append(s_b) # Store best solution at each iteration
i += 1
if i >= n or e <= t: # Convergence condition
converged = True
return S
Case Study#
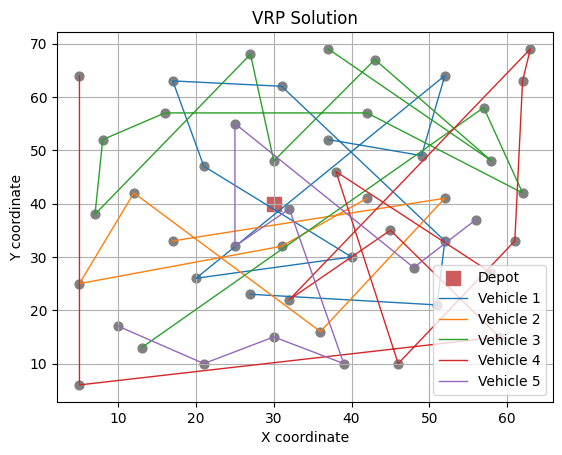
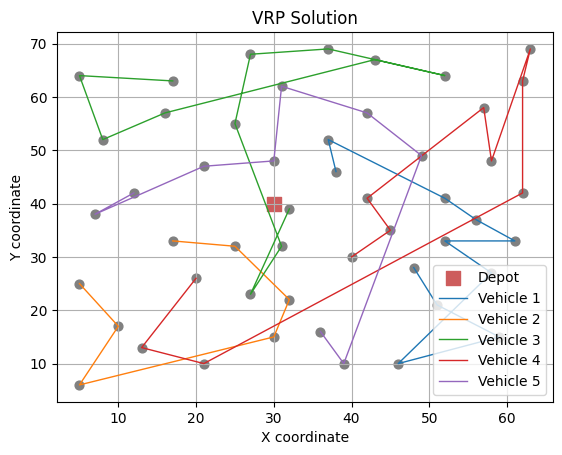
Here, we have a benchmarked Vehicle Routing Problem instance (E-n51-k5) defined on a directed graph \(G=(d,C)\), where \(d\) represents depot node, and node set \(C\) represents customer nodes. Here, each customer node \(c \in C\) has a demand \(q_c\) that must be fulfilled from the depot via delivery fleet \(V\), wherein each vehicle \(v\) has a capacity \(q_v\). Given traversal length \(d_{ij}\) for arc \((i,j) \in A\), the objective of a Vehicle Routing Problem is to develop routes from the depot node using select vehicles such that every customer node is visited exactly once while minimising the total distance traveled and satisfying all vehicle capacity constraints.
D = [(0, 30, 40, 0)]
C = [
(1, 37, 52, 7),
(2, 49, 49, 30),
(3, 52, 64, 16),
(4, 20, 26, 9),
(5, 40, 30, 21),
(6, 21, 47, 15),
(7, 17, 63, 19),
(8, 31, 62, 23),
(9, 52, 33, 11),
(10, 51, 21, 5),
(11, 42, 41, 19),
(12, 31, 32, 29),
(13, 5, 25, 23),
(14, 12, 42, 21),
(15, 36, 16, 10),
(16, 52, 41, 15),
(17, 27, 23, 3),
(18, 17, 33, 41),
(19, 13, 13, 9),
(20, 57, 58, 28),
(21, 62, 42, 8),
(22, 42, 57, 8),
(23, 16, 57, 16),
(24, 8, 52, 10),
(25, 7, 38, 28),
(26, 27, 68, 7),
(27, 30, 48, 15),
(28, 43, 67, 14),
(29, 58, 48, 6),
(30, 58, 27, 19),
(31, 37, 69, 11),
(32, 38, 46, 12),
(33, 46, 10, 23),
(34, 61, 33, 26),
(35, 62, 63, 17),
(36, 63, 69, 6),
(37, 32, 22, 9),
(38, 45, 35, 15),
(39, 59, 15, 14),
(40, 5, 6, 7),
(41, 10, 17, 27),
(42, 21, 10, 13),
(43, 5, 64, 11),
(44, 30, 15, 16),
(45, 39, 10, 10),
(46, 32, 39, 5),
(47, 25, 32, 25),
(48, 25, 55, 17),
(49, 48, 28, 18),
(50, 56, 37, 10)
]
V = [
(1, 160),
(2, 160),
(3, 160),
(4, 160),
(5, 160)
]
# Compute total cost
def f(s):
z = 0
d = D[0]
for k, R in enumerate(s):
if not R:
continue
# Distance
n = C[R[0]]
z += np.sqrt((d[1] - n[1])**2 + (d[2] - n[2])**2)
for i in range(len(R)-1):
m = C[R[i+1]]
z += np.sqrt((n[1] - m[1])**2 + (n[2] - m[2])**2)
n = m
z += np.sqrt((n[1] - d[1])**2 + (n[2] - d[2])**2)
# Penalty
v = V[k]
q_v = v[1]
w = sum(C[i][3] for i in s[k])
p = max(0, w-q_v)
z += 100 * p
return z
# Move
def N1(s):
s_n = copy.deepcopy(s)
i, j = random.sample(range(len(V)), 2)
k = random.randint(0, len(s_n[i])-1)
c = s_n[i][k]
del s_n[i][k]
k = random.randint(0, len(s_n[j]))
s_n[j].insert(k, c)
return s_n
# Swap
def N2(s):
s_n = copy.deepcopy(s)
i, j = random.sample(range(len(V)), 2)
if not s_n[i]:
return s_n
if not s_n[j]:
return s_n
a = random.randint(0, len(s_n[i])-1)
b = random.randint(0, len(s_n[j])-1)
s_n[i][a], s_n[j][b] = s_n[j][b], s_n[i][a]
return s_n
# 2-opt
def N3(s):
s_n = copy.deepcopy(s)
i = random.choice([k for k, R in enumerate(s_n) if len(R) >= 4])
R = s_n[i]
a, b = sorted(random.sample(range(len(R)), 2))
R[a:b+1] = reversed(R[a:b+1])
s_n[i] = R
return s_n
# Local Search
def ls(s, N, X):
for _ in range(X.get("n", 50)):
s_n = N(s)
if f(s_n) < f(s):
s = s_n
return s
# Visualise
def viz(s):
d = D[0]
plt.scatter(d[1], d[2], c='indianred', marker='s', s=100, label='Depot')
for i, R in enumerate(s):
if R:
x = [C[j][1] for j in R]
y = [C[j][2] for j in R]
plt.plot(x, y, label=f'Vehicle {i+1}', linewidth=1)
plt.scatter([C[k][1] for k in R], [C[k][2] for k in R], s=40, color='grey')
plt.legend()
plt.title("VRP Solution")
plt.xlabel("X coordinate")
plt.ylabel("Y coordinate")
plt.grid(True)
plt.show()
# Initial solution
d = D[0]
s_o = [[] for v in V]
for i, c in enumerate(C):
q_c = c[3]
for j, v in enumerate(V):
q_v = v[1]
w = sum(C[k][3] for k in s_o[j])
if w + q_c <= q_v:
s_o[j].append(i)
break
viz(s_o)
# N1 neighbourhood
N = N1
X = {"n": 100}
S = ils(s_o, ls, N, X, n=1000, t=1e-15)
s_b = S[-1]
F = [f(s) for s in S]
# Report outcome
print("Best solution:", s_b)
print("Objective function value:", f(s_b))
# Convergence plot
fig = plt.figure()
plt.plot(F)
plt.xlabel("Iteration")
plt.ylabel("Objective Function Value")
plt.title("Convergence of Iterated Local Search Algorithm")
plt.grid()
plt.tight_layout()
plt.show()
# Visualise the solution
viz(s_b)
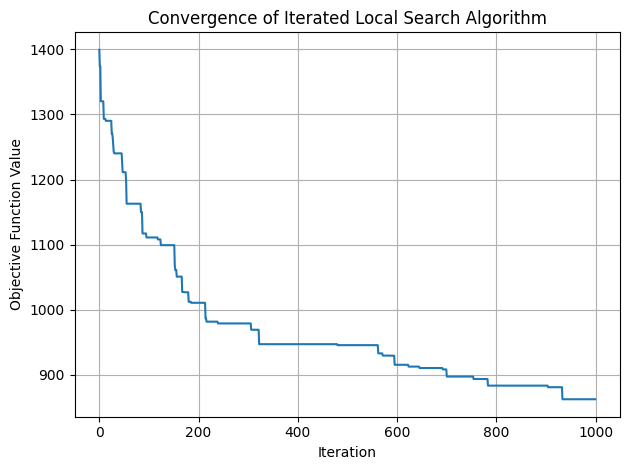
Best solution: [[45, 48, 37, 1, 2, 27, 30, 7, 25, 6], [24, 42, 22, 26, 47, 0, 5, 23, 17], [31, 21, 19, 15, 10, 4, 3, 13, 43, 36], [11, 32, 9, 33, 20, 28, 35, 34, 49, 29, 8], [12, 18, 40, 39, 44, 38, 46, 41, 14, 16]]
Objective function value: 862.5149116363642
# N2 neighbourhood
N = N2
X = {"n": 100}
S = ils(s_o, ls, N, X, n=1000, t=1e-15)
s_b = S[-1]
F = [f(s) for s in S]
# Report outcome
print("Best solution:", s_b)
print("Objective function value:", f(s_b))
# Convergence plot
fig = plt.figure()
plt.plot(F)
plt.xlabel("Iteration")
plt.ylabel("Objective Function Value")
plt.title("Convergence of Iterated Local Search Algorithm")
plt.grid()
plt.tight_layout()
plt.show()
# Visualise the solution
viz(s_b)
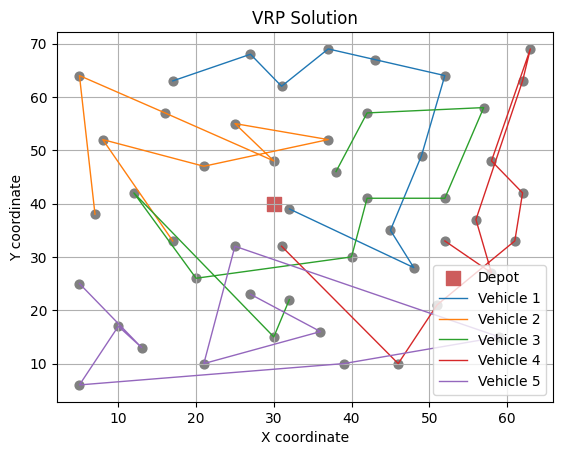
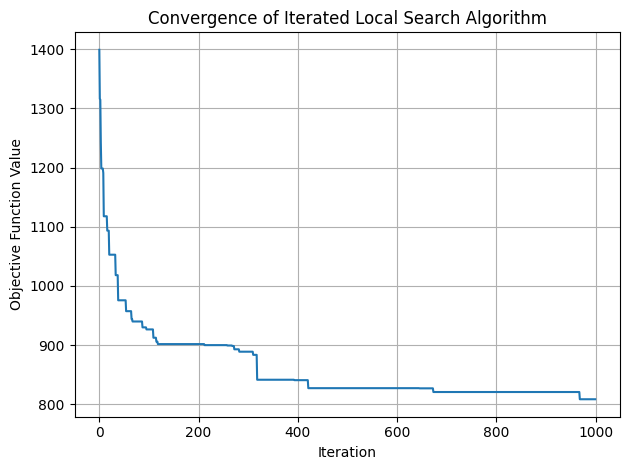
Best solution: [[31, 0, 15, 49, 33, 8, 29, 32, 38, 9, 48], [12, 40, 39, 43, 36, 46, 17], [6, 42, 23, 22, 27, 2, 30, 25, 47, 11, 16, 45], [4, 37, 10, 19, 28, 35, 34, 20, 41, 18, 3], [13, 24, 5, 26, 7, 21, 1, 44, 14]]
Objective function value: 808.4527846358693
# N3 neighbourhood
N = N3
X = {"n": 100}
S = ils(s_o, ls, N, X, n=1000, t=1e-15)
s_b = S[-1]
F = [f(s) for s in S]
# Report outcome
print("Best solution:", s_b)
print("Objective function value:", f(s_b))
# Convergence plot
fig = plt.figure()
plt.plot(F)
plt.xlabel("Iteration")
plt.ylabel("Objective Function Value")
plt.title("Convergence of Iterated Local Search Algorithm")
plt.grid()
plt.tight_layout()
plt.show()
# Visualise the solution
viz(s_b)
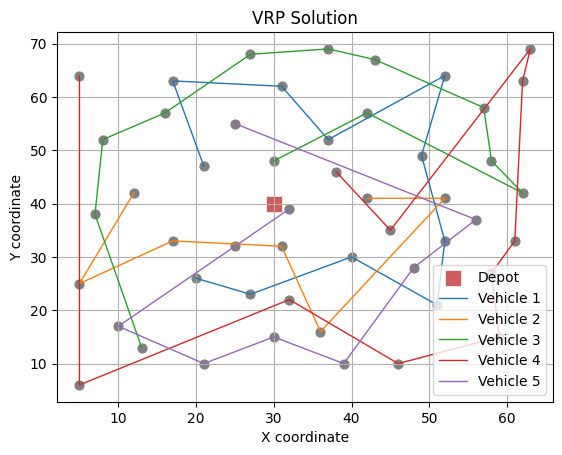
Best solution: [[5, 6, 7, 0, 2, 1, 8, 9, 4, 16, 3], [10, 15, 14, 11, 17, 12, 13], [18, 24, 23, 22, 25, 30, 27, 19, 28, 20, 21, 26], [31, 37, 35, 34, 33, 29, 38, 32, 36, 39, 42], [47, 49, 48, 44, 43, 41, 40, 46, 45]]
Objective function value: 922.1459371383303
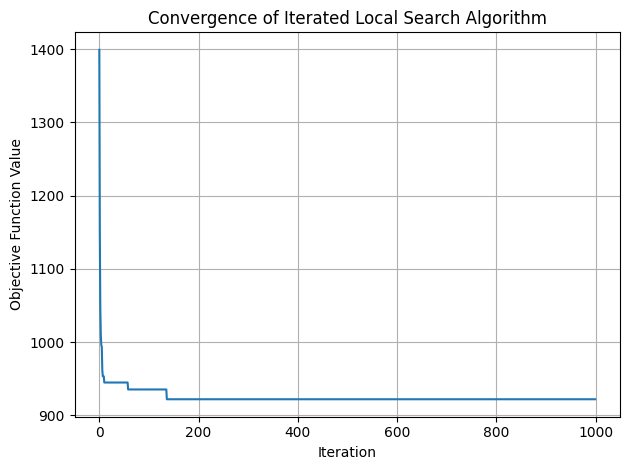
Note
Notice, the distinct behaviour of different neighbourhoods of VRP. Here, N1 makes continuous small improvement albeit slowly, while on the other extreme, N3 makes initial larger improvement but fails to continuously improve the solution. To this end, combining these neighbourhoods to comprehensively explore and exploit the solution landscape could render continuous substanital improvements in the solution. We will explore this alternate approach of employing multiple neighbourhoods in the next lecture with Variable Neighbourhood Search algorithm.