import matplotlib
if not hasattr(matplotlib.RcParams, "_get"):
matplotlib.RcParams._get = dict.get
Lecture 35: Cellular Automata in Python#
Note
This lectures focuses on implementation of Safety Distance Model through Cellular Automata for a single-lane car following model in Python.
Nagel–Schreckenberg Model#
Introduction#
The NaSch Cellular Automaton (short for Nagel–Schreckenberg model) is one of the most widely used cellular automata models to study vehicular traffic flow. Here, space is discretized into cells (1D Lattice) wherein each cell is either empty or occupied by exactly one vehicle, while time progresses in discrete steps, rendering discrete vehicle speeds. It was proposed in 1992 by Kai Nagel and Michael Schreckenberg as a microscopic, stochastic traffic model, designed to capture essential dynamics of highway traffic while being simple enough for large-scale simulation.
Attributes
Location: \(x_i(t)\)
Speed: \(v_i(t)\)
Behavioral Rules
Acceleration: \(v_i(t + \Delta t) \rightarrow \min (v_i(t) + 1, \bar{v})\)
Deceleration: \(v_i(t + \Delta t) \rightarrow \min (v_i(t), h_i(t))\)
Stochastic Braking: \(v_i(t + \Delta t) \rightarrow \max (v_i(t) - 1, 0)\) with probability \(p\)
Movement: \(x_i(t + \Delta t) \rightarrow x_i(t) + v_i(t + \Delta t)\)
Simulation Mechanism
Initialization: Define road length \(l\), maximum velocity \(\bar{v}\), braking probability \(p\), and number of vehicle \(n\). Randomly assign vehicle positions \(x_i(0)\) and initial speed \(v_i(0) \in [0, \bar{v}]\).
Perception: Each vehicle observes its immediate leader, computes its headway \(h_i(t)\), and notes its current speed \(v_i(t)\)
Decision-Making: Accelerate if possible; Decelerate to maintain safe distance; Randomization (stochastic braking)
Action: Update each vehicle’s position
Environment Update: Resolve the new lattice configuration (occupied and empty cells), ensuring synchronous updates for all vehicles.
Iteration: Repeat steps for each time step until the simulation horizon \(k\) is reached. Collect metrics (flow, density, average speed, jam length).
Emergent Behavior
Free Flow: At low densities, car move at a speed close to \(v_{max}\)
Traffic Jams: At higher densities, jams form spontaneously due to the randomization rule
Phase Transition: The model shows a transition from free flow to congested traffic as density increases
Stop-and-Go Waves: Jam fronts propagate backward through traffic, resembling real highway observations.
Implementation#
Pseudo Code#
Python Implementation#
import numpy as np
def NaSchCA(l, n, v, p, k, seed):
"""
Simulate the Nagel–Schreckenberg (NaSch) cellular automaton model of traffic flow
on a single-lane ring road.
Parameters
----------
l : int
Length of the lattice (number of discrete cells in the ring road).
n : int
Number of vehicles on the lattice.
v : int
Maximum velocity (cells per time step) allowed for a vehicle.
p : float
Stochastic braking probability (0 <= p <= 1).
k : int
Number of time steps (iterations) to simulate.
seed : int
Random seed for reproducibility of stochastic braking.
Returns
-------
dict
A dictionary containing:
- ``X`` : ndarray of shape (n,)
Final positions of vehicles on the lattice.
- ``V`` : ndarray of shape (n,)
Final velocities of vehicles.
- ``Z`` : ndarray of shape (k, l)
Space–time raster of the system, where each entry indicates
the velocity of a vehicle occupying a cell, or -1 if empty.
- ``f`` : float
Mean flow over the simulation horizon, normalized by lattice length.
"""
# Intialize
rng = np.random.default_rng(seed)
s = l // n
X = np.arange(0, s*n, s) % l
V = np.zeros(n, dtype=int)
I = (np.arange(n) + 1) % n
# Iterate
f = 0
Z = np.full((k, l), -1, dtype=int) # cell entry indicates speed of the vehicle occupying it; -1 if it is empty
for t in range(k):
Z[t, X] = V
# Perception
H = (X[I] - X - 1) % l
# Decision-Making | Action | Environment Update
## Acceleration
V = np.minimum(V + 1, v)
## Deceleration
V = np.minimum(V, H)
## Stochastic Braking
r = rng.random(n)
M = (r < p) & (V > 0)
V[M] -= 1
X = (X + V) % l
f += V.sum() / (k * l)
return {"X": X, "V": V, "Z": Z, "f": f}
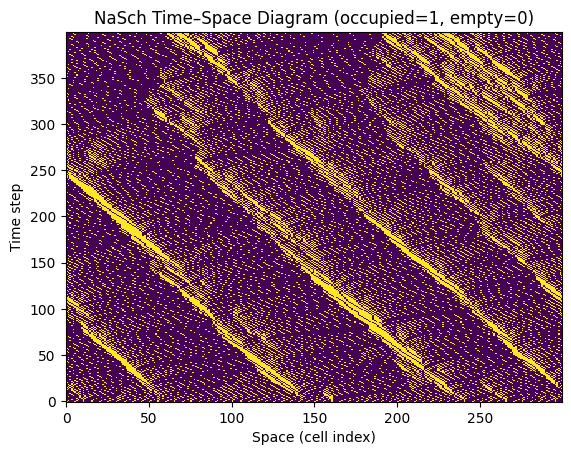
# Time–space occupancy diagram
import matplotlib.pyplot as plt
# Input Parameters
l = 300
n = 60
v = 10
p = 0.2
k = 400
seed = 0
# Output
R = NaSchCA(l, n, v, p, k, seed)
Z = (R["Z"] >= 0).astype(int)
# Plot
plt.figure()
plt.imshow(Z, aspect='auto', origin='lower', interpolation='nearest')
plt.xlabel("Space (cell index)")
plt.ylabel("Time step")
plt.title("NaSch Time–Space Diagram (occupied=1, empty=0)")
plt.show()
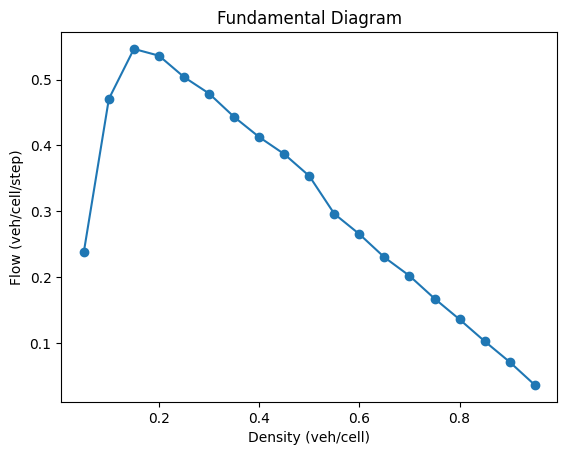
# Fundamental diagram (flow vs density) via density sweep
import numpy as np
import matplotlib.pyplot as plt
# Input Parameters
l = 300
v = 5
p = 0.2
k1 = 300
k2 = 600
seed = 0
D = np.linspace(0.05, 0.95, 19)
F = []
for d in D:
n = max(1, int(round(d*l)))
_ = NaSchCA(l, n, v, p, k1, seed)
R = NaSchCA(l, n, v, p, k2, seed)
F.append(R["f"])
plt.figure()
plt.plot(D, F, marker='o')
plt.xlabel("Density (veh/cell)")
plt.ylabel("Flow (veh/cell/step)")
plt.title("Fundamental Diagram")
plt.show()